
Clavel等发明了Delta机器人,瑞士Demaurex公司在其本体上进行应用与开发,实现了食品、医药等行业的分拣、包装及抓放作业。Nabat等发明了一种四自由度并联机器人Par4,实现了产品高加速、低振动拾放作业。Delta机器人与Par4四自由度并联机器人主要针对空间上产品的拾放,对于单平面内产品的拾放来说,使用多个电机驱动必然是一种资源的浪费。黄田等发明了二自由度高速并联机器人Diamond,实现了平面内产品的高精度拾放作业,弥补了国内市场包装行业的空缺。

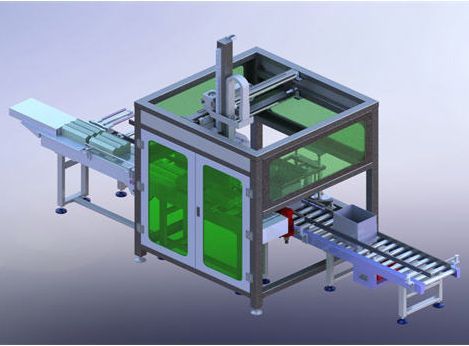
ADR-I 蜘蛛手并联机器人装箱





 扫一扫 关注微信
扫一扫 关注微信 浙公网安备 33030402001056号
浙公网安备 33030402001056号